Homework 09 - Metric reconstruction
This homework is split into two weeks.
Part A: Essential matrix
Having a fundamental matrix F and camera calibration K, the essential matrix E can be computed from the equation
$F = K^{-\top} E K^{-1}\,.$
First, matrix E1 is computed as
$E1 = K^{\top} F K\,.$
Due to errors in data used to estimate F and/or K, the obtained matrix E1 is not a true essential matrix, its two non-zero singular values are not equal. So the matrix must be modified in order to make these singular values equal. The matrix E1 should be decomposed using the singular value decomposition, the matrix D replaced by diag(1,1,0) and correct esential matrix E is composed back.
$E1 = U D V^{\top}$
$E = U \left[\begin{array}{ccc}1&0&0\\0&1&0\\0&0&0\end{array}\right]V^{\top}$
Finally, K should be applied to compute a fundamental matrix Fe consistent with K from E (this matrix will differ from the original F).
Steps
Find two essential matrices. A possibly bad Ex and the best E
- Compute essential matrix
Exusing your best fundamental matrixFestimated in HW-08. Compute also the fundamental matrixFxconsistent withKfromExandK - Draw the 12 corresponding points IX (from HW-08) in different colour in the two images. Using
Fx, compute the corresponding epipolar lines and draw them into the images in corresponding colours. Export as09_egx.pdf. - Draw graphs of epipolar errors
d1_iandd2_iw.r.tFxfor all points. Draw both graphs into single figure (different colours) and export as09_errorsx.pdf. - Find essential matrix
Eby minimizing the maximum epipolar error of the respective fundamental matrixFeconsistent withKusing the same correspondences:- Generate all 7-tuples from the set of 12 correspondences and estimate fundamental matrix
Ffor each of them. - For each tested
F, compute essential matrixEusing internal calibrationK. - Compute fundamental matrix
Feconsistent withKfromEandKand its epipolar error over all matches. - Choose such
FeandEthat minimize maximal epipolar error over all matches.
- Draw the 12 corresponding points in different colour in the two images. Using
Fe, compute the corresponding epipolar lines and draw them into the images in corresponding colours. Export as09_eg.pdf. - Draw graphs of epipolar errors
d1_iandd2_iw.r.tFefor all points. Draw both graphs into single figure (different colours) and export as09_errors.pdf. - Save
F,Ex,Fx,E,Feandu1,u2,point_sel_e(indices of seven points used for computingFe) as09a_data.mat.
Part B: Cameras and reconstruction
- Decompose the best
Einto relative rotationRand translationC(four solutions). Choose such a solution that reconstructs (most of) the points in front of both (computed) cameras. - Construct projection matrices
P1,P2(includingK). - Compute scene points
X. - Display the images, draw the input points as blue dots and the scene points
Xprojected by appropriateP_ias red circles. Draw also the edges, connecting the original points as yellow lines. Export as09_reprojection.pdf. - Draw graph of reprojection errors and export as
09_errorsr.pdf. - Draw the 3D point set (using 3D plotting facility) connected by the edges as a wire-frame model, shown from the top of the tower, from the side, and from some general view. Export as
09_view1.pdf,09_view2.pdf, and09_view3.pdf. - Save
Fe,E,R,C,P1,P2,X, andu1,u2,point_sel_eas09b_data.mat.
| Example of the corresponding points and edges | Example of a wire-frame model reconstruction |
|---|---|
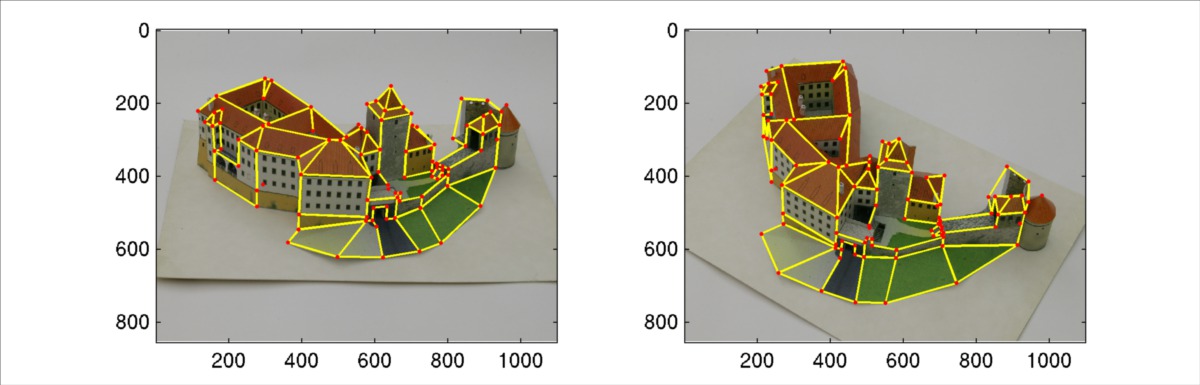 |  |
Upload
The first part: upload an archive consisting of:
09_errorsx.pdf,09_errors.pdf09_egx.pdf,09_eg.pdf09a_data.mathw09a.morhw09a.py– your implementation- any other files required by your implementation
The second part: upload an archive consisting of:
09b_data.mat09_reprojection.pdf09_errorsr.pdf09_view1.pdf,09_view2.pdf,09_view3.pdfhw09b.morhw09b.py– your implementation- other files required by your implementation